
Groovy-PID
 |
|
- 概要
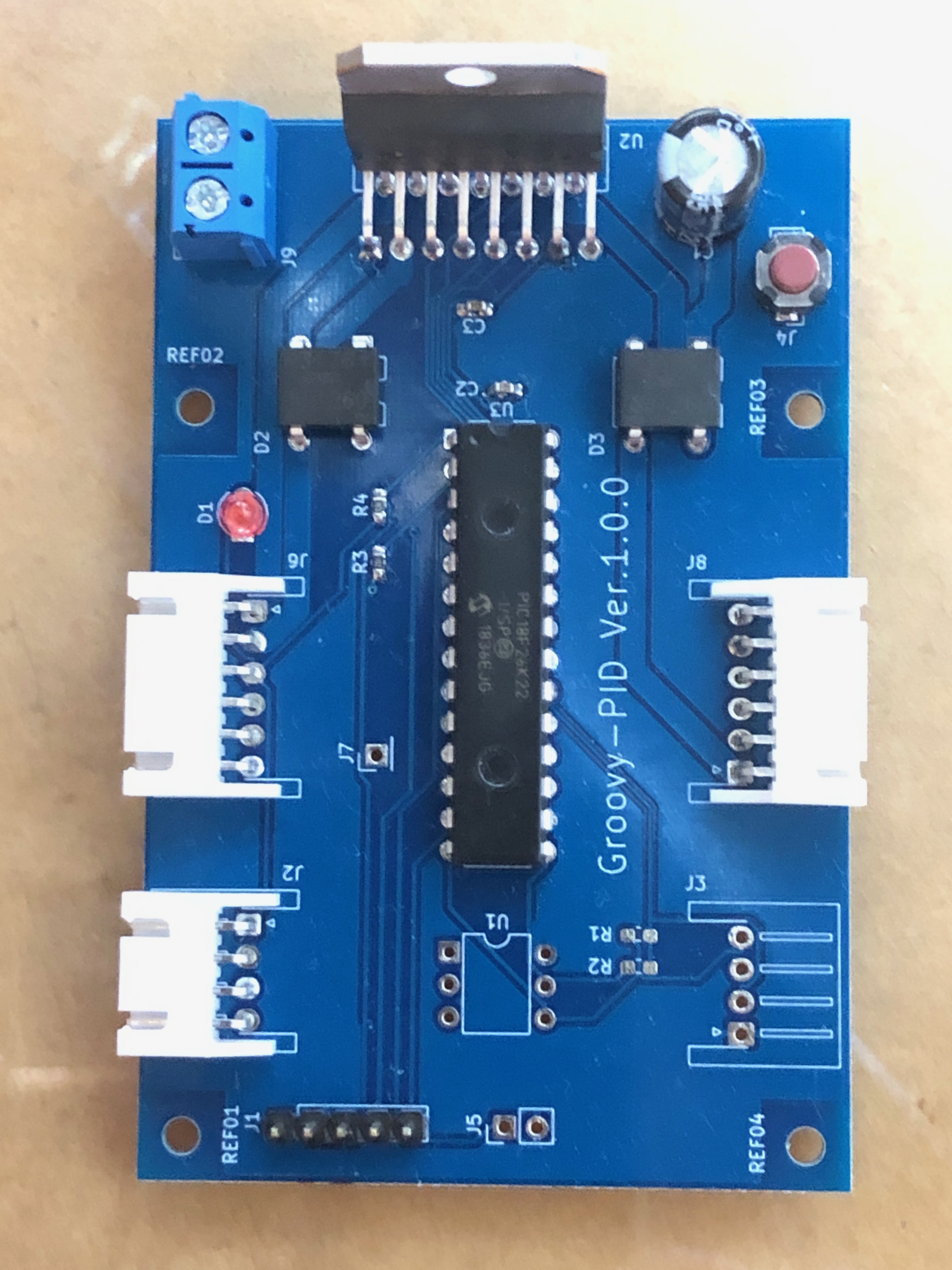
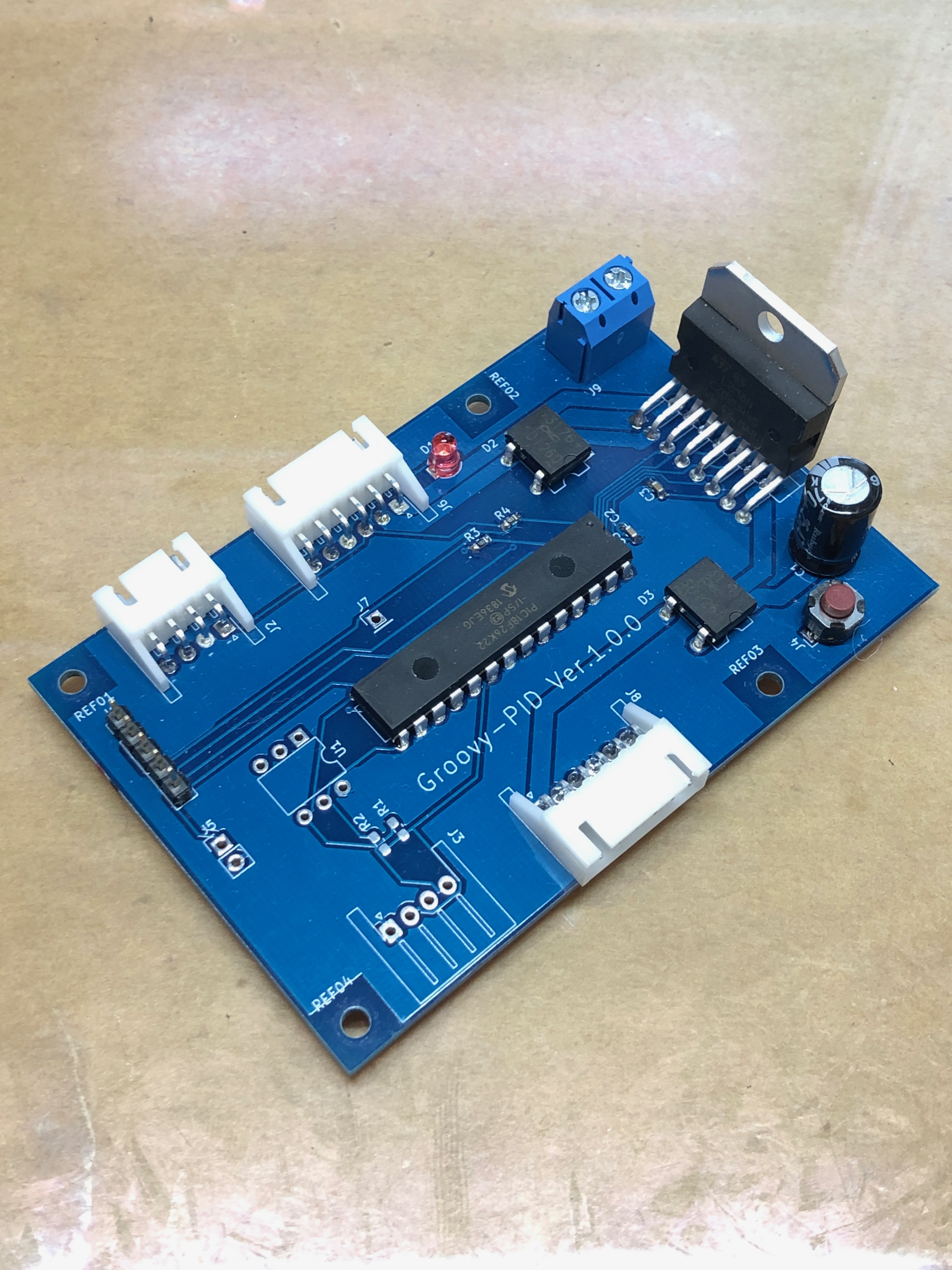
主要部品に- PIC18F26K22
- L298N
を用いたUART経由でencoder付きモータをPID制御できる実験ボード
- 特徴
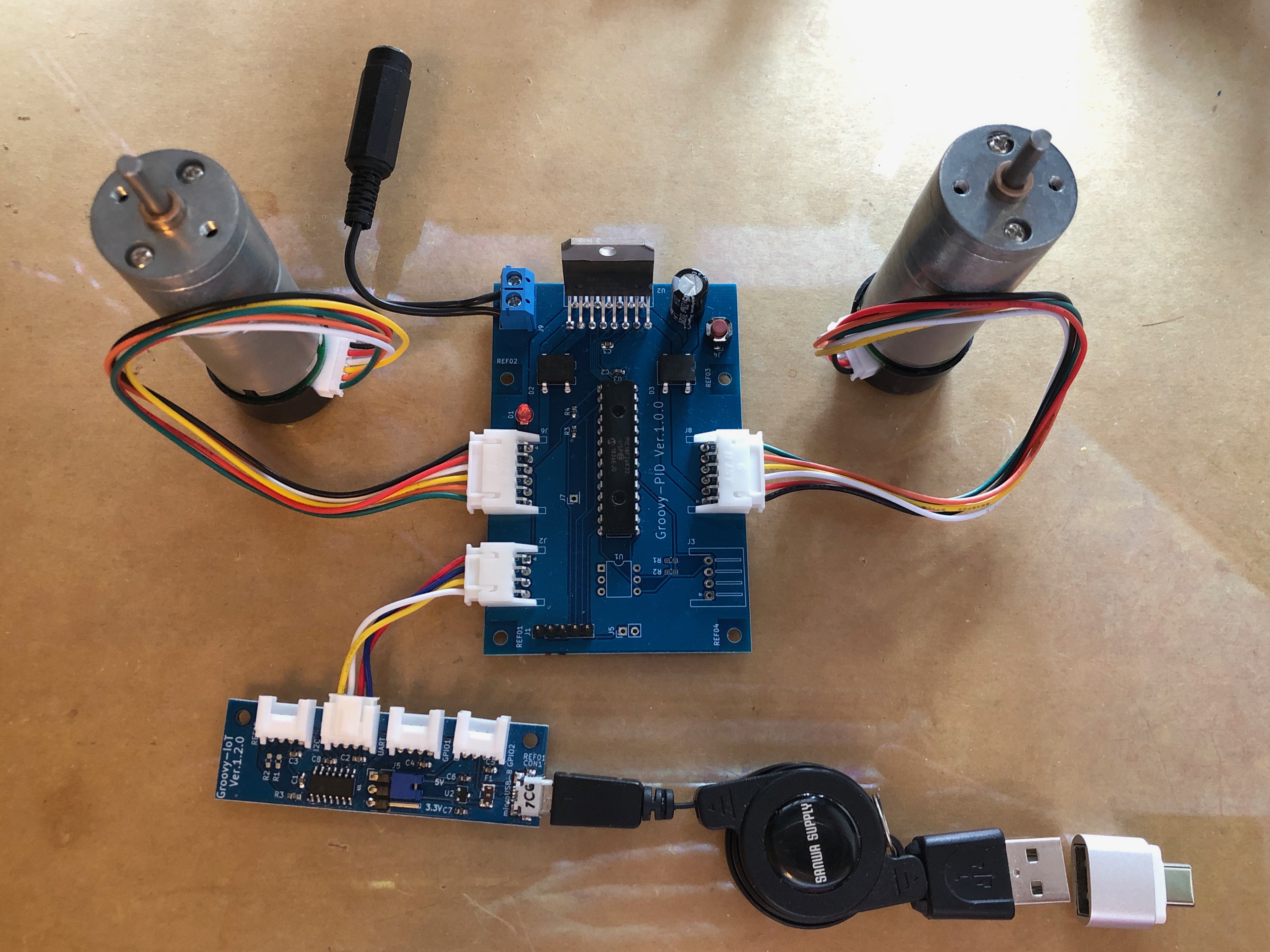
- アマゾン(amazon.co.jp/amazon.com)やAliexpressで安価に入手できるencoder付きモータをPID制御できる
ロボに転用できそうな様々な種類のキャタピラや四輪の台車が販売されています。
- Groovy-Family
Groovy-IoTとの連携を意識しているので、ケーブルセット一本でスッキリと接続可能です。
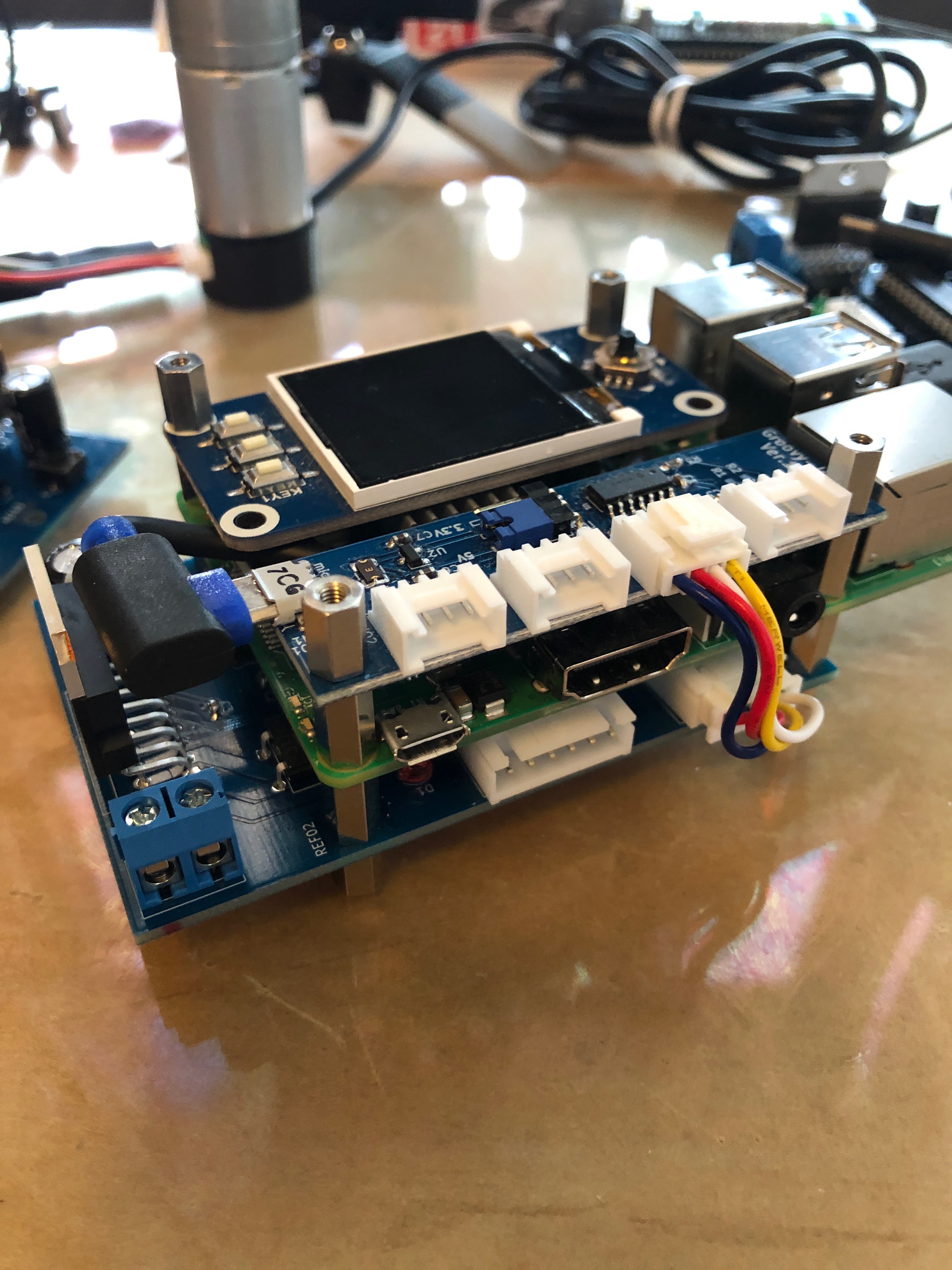
- 取り付け穴位置をRaspberry-Pi(RasPi)に合わせているため、重ねてシステムに実装できる
ROSを前提とした高機能のロボを作る場合はRasPiの利用が便利です。本基板はRasPiとの連動を意識しているため、重ねてシステムに実装できます。
- オープンソースソフトウェア(OSS)
制御は様々な実験的な実装を試みたくなります。それに対応するため、サンプルソフトをOSSとして公開しています。PicKit3(とその互換品)を用意すれば、ご自身で開発したソフトで動作させることができます。
こちらになります。 - 豊富なオプション
パワートランジスタのヒートシンクや9軸センサをオプションとして利用できます。これらにより、より安定性や高機能なボードとしての利用が可能です。
- 高機能Shell
組み込みソフト用のShellとして定評のあるMicroShellの機能の一部を組み込みました。これにより、柔軟なコマンド拡張が可能です。
- アマゾン(amazon.co.jp/amazon.com)やAliexpressで安価に入手できるencoder付きモータをPID制御できる
- 開発の動機
ROS(Robot Operating System)の勉強を始めようと思いました。簡単な台車があればできるかな?と考えました。台車になりそうなキャタピラタイプのモータ付きのキットはAmazonなどで目にします。これらにはencoderが付き、それにより回転数を検知することができます。調べたところ、モータを制御できる基板があまりありません。適価な基板を二点ほど見つけましたが、どうも自分の用途には合わないので、自身で開発することにしました。





