
メカ選定
〜工事中〜
ロボットを構成する要素を列記します。
- 台車
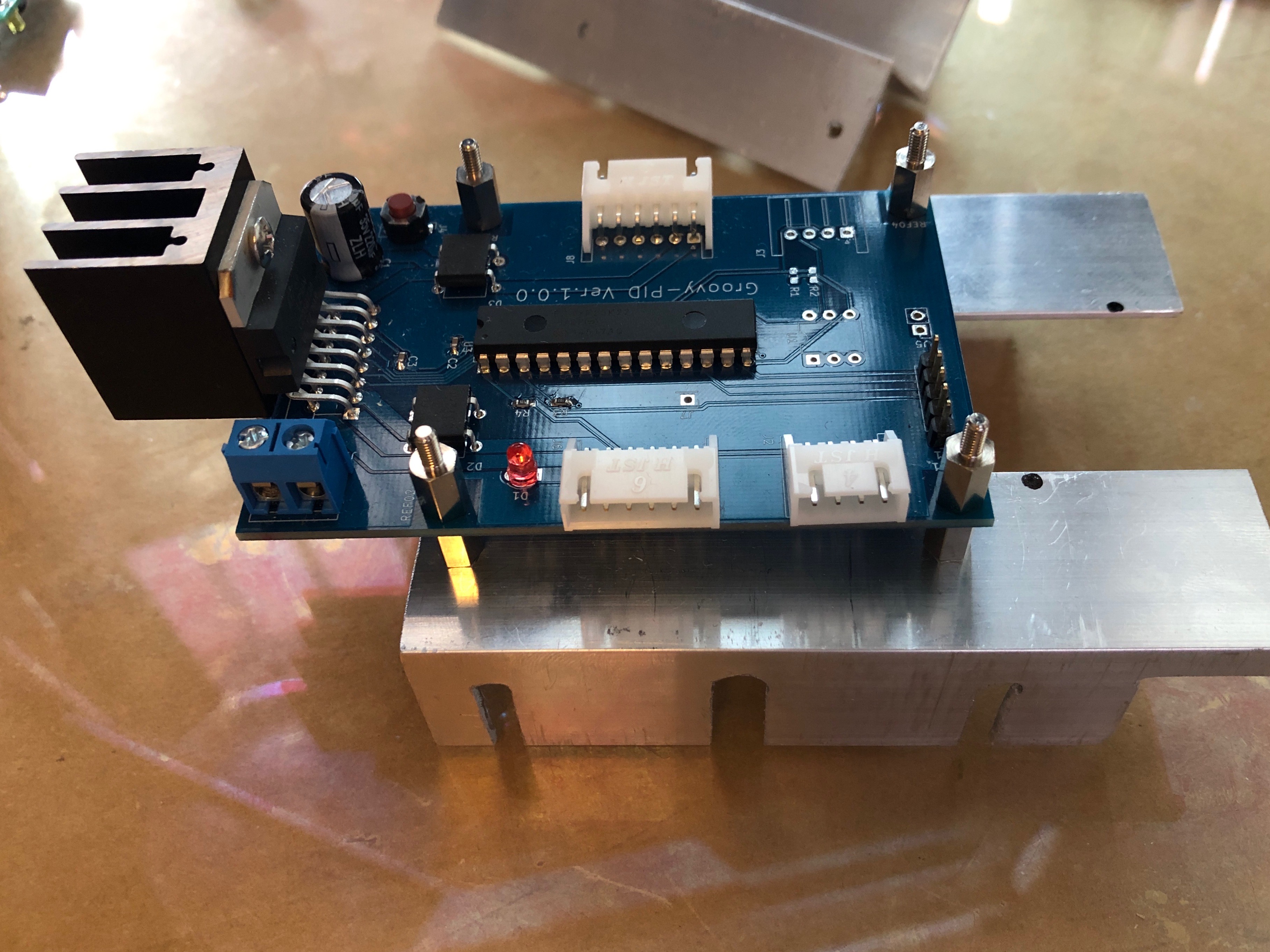
そもそも、Groovy-PIDを作ろうと思ったモチベーションがこの台車の存在でした。エンコーダ付きのモータが標準で付属していますが、このモータを制御する基盤がありません。エンコーダ付きギヤードモータが付属している台車は色々と販売されています。本システムで作った台車を紹介します。- モータ
この台車のモータはギア比が高いので高速走行に向きません。ギア比が低く、高回転型に付け替えます。この作業がお手軽に出来るのも、この手のモータの特徴と言えるでしょう。
- モータ
- ブラケット
ブラケットは2種類製作します。台車の形状と搭載するボード類(ペイロード)によって変わるので、これは自作する必要があります。
- コントローラ部と台車の接続
コントローラ部はRasPI, Groovy-IoT, Groovy-PIDをM2.6・首下8mmのスペーサでスタックします。これを搭載できる必要最小限のフットプリントで構成します。

- ステレオカメラ取り付け用
画像取り込み用のステレオカメラを取り付けます。
- コントローラ部と台車の接続





