電源モジュールと配線
〜工事中〜
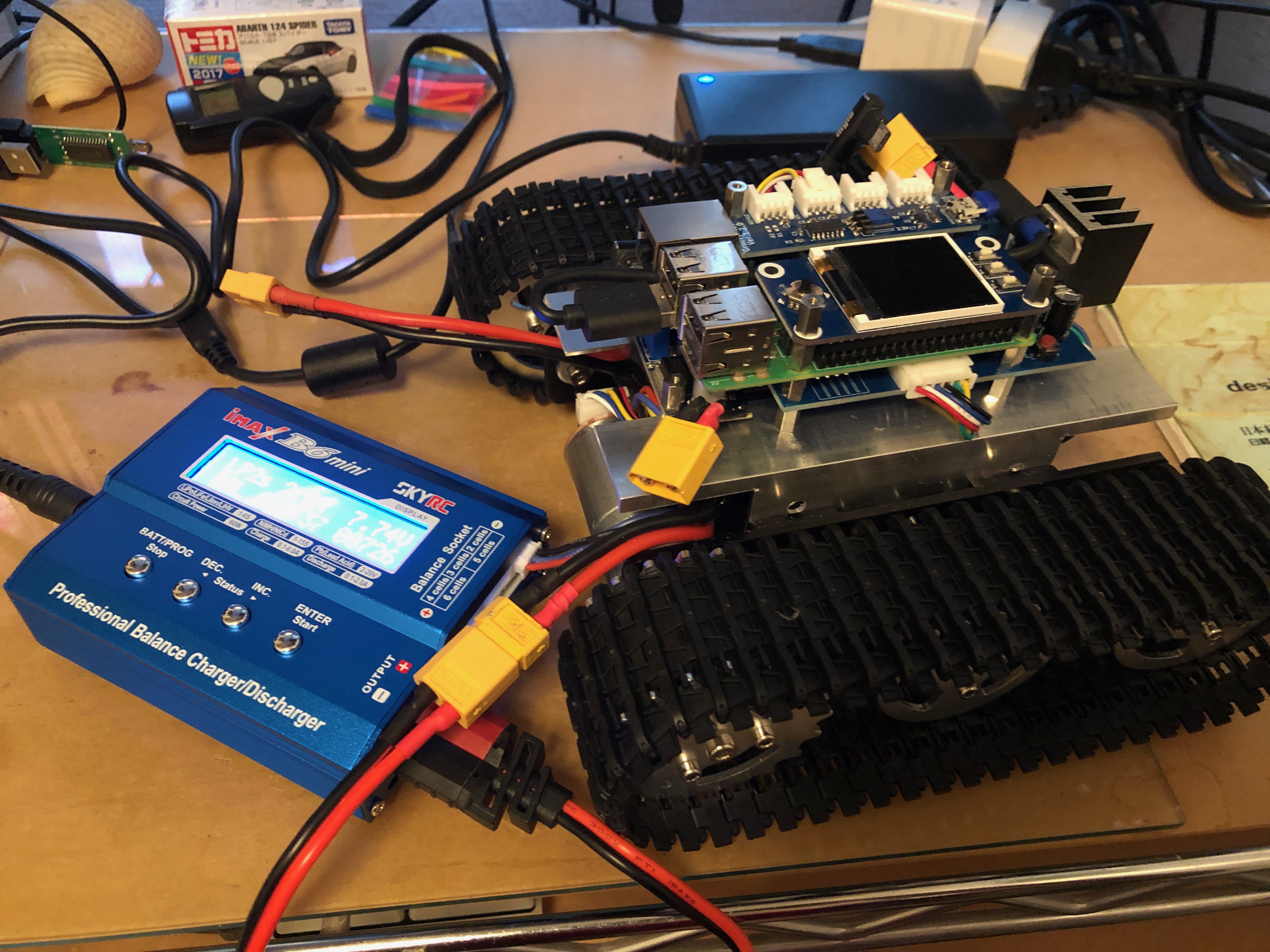
ロボットの電装の解説をします。ロボットは外部から給電を受けられないStandAloneなシステムなのでバッテリ駆動が前提になります。ここでは、バッテリや給電・充電システムについての解説です。
- バッテリ
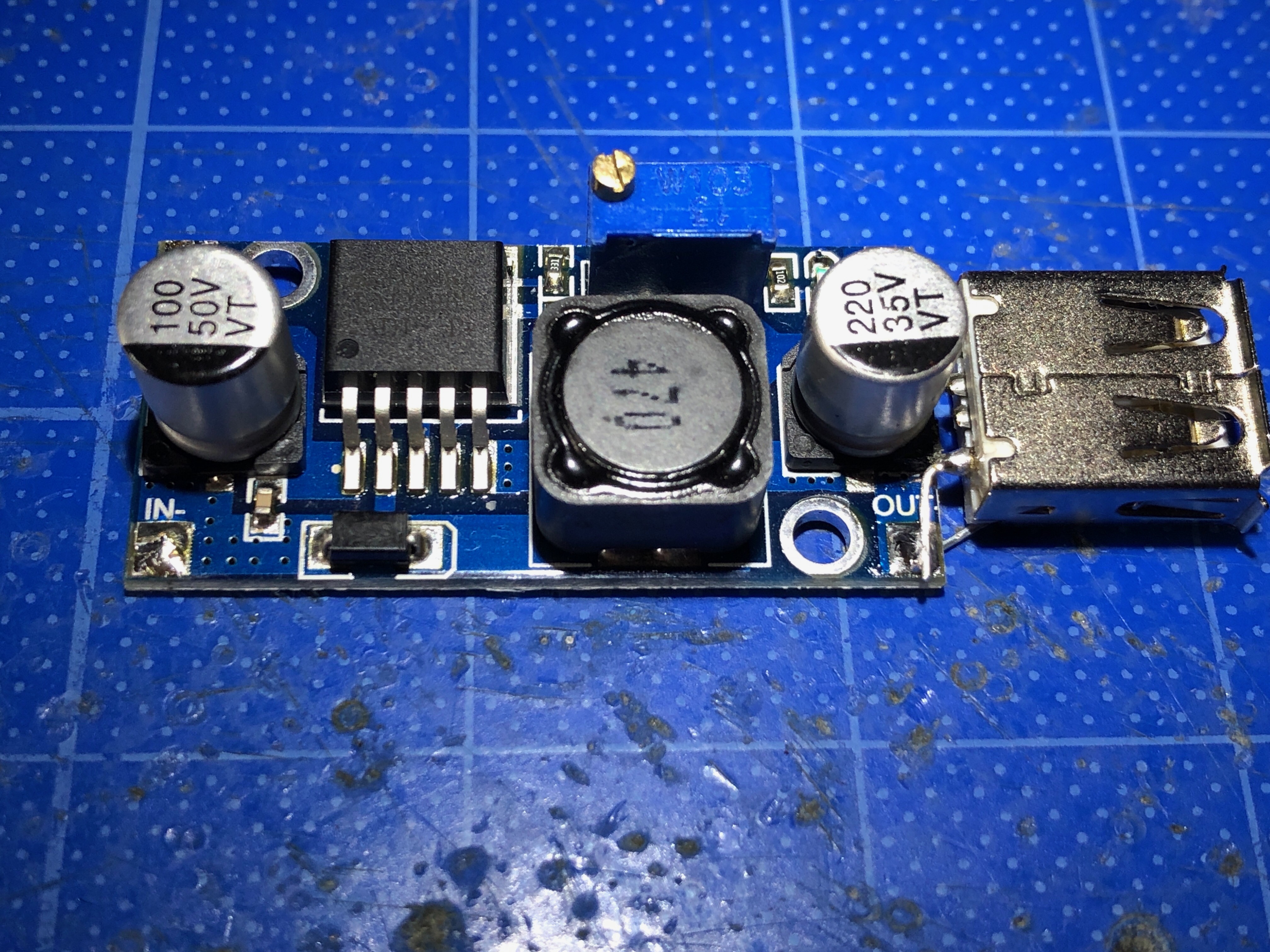
バッテリは2種類使っています。ロボットの駆動用は11.1V、ラズパイなどの制御系は7.4Vあるいは6.0Vタイプを使います。駆動系はそのまま使いますが、制御系はあとに述べる降圧電源モジュールを介して接続します。今回使用した降圧電源モジュールでは電位差が2.5V程度必要とのことでしたが、6Vバッテリでも5Vが出力でき制御系の制御も行えたので、熱に変わる分が少ない分いいかなと思い、そのまま利用しています。もちろん自己責任になります。バッテリの選定は特に難しいです。理由として、大きさ、各種性能(駆動時間、速度など)、価格のTrade-offとなるためです。 - 降圧電源モジュール
降圧電源モジュールは7.4Vバッテリから5Vを作り出し、RasPi, Groovy-PIDに給電します。話が前後しますが、降圧電源モジュールの定格をよく確認してから、バッテリの選定をしてください。
- 単体テスト
電源モジュールが正常動作しているかどうかの単体テストを行います。定格電圧を入力に与え、適切な電圧が出力されているかを確認します。この手のモジュールを入手した場合は必ず単体テストを行い所望の動作をしているかどうかを確認する癖を身につけたいものです。
- 配線

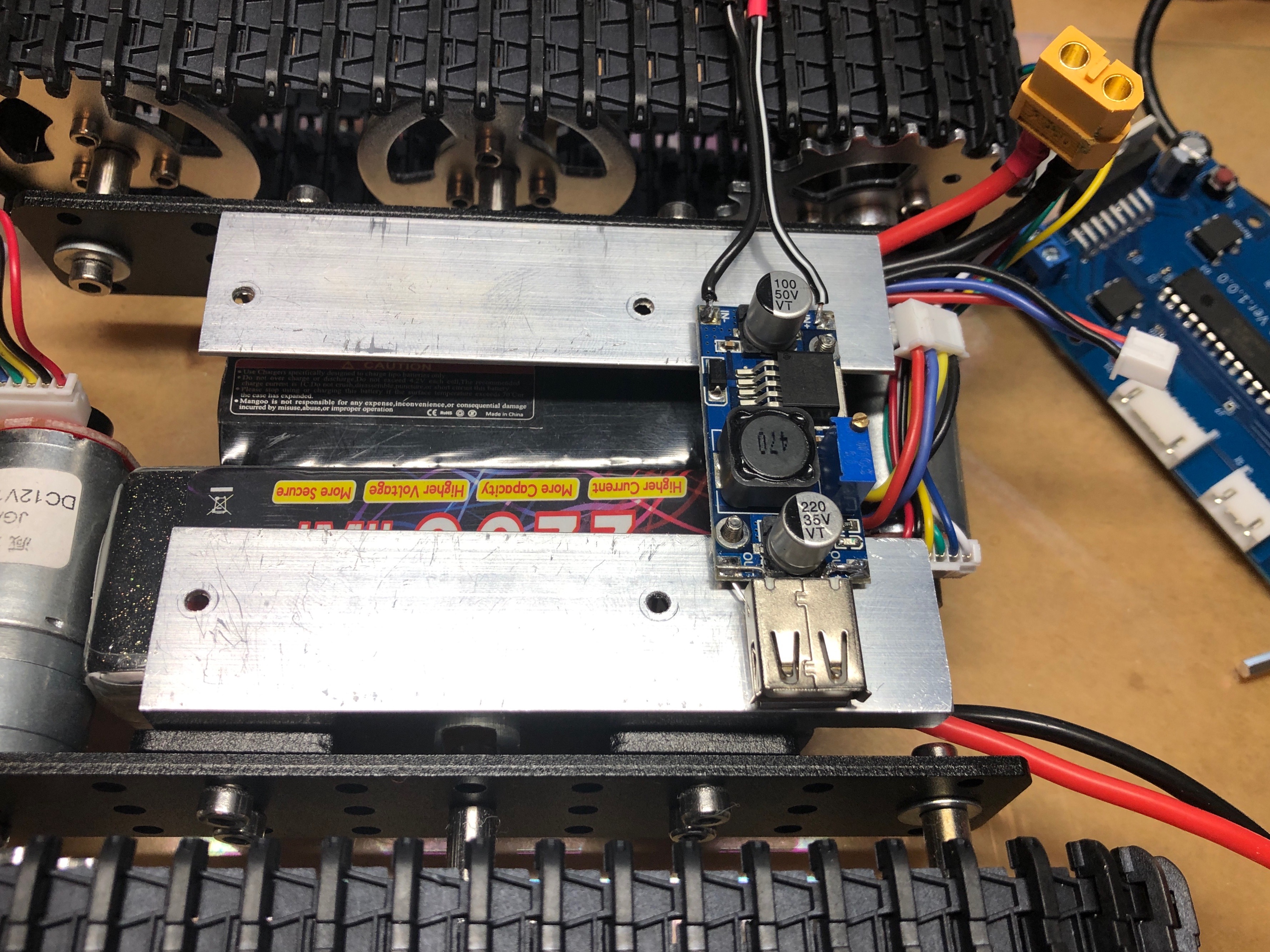
バッテリはモータ用とコンピュータ用に分けています。モータ用の電源はそのままGroovy-PIDの電源端子に接続します。コンピュータ用のバッテリは降圧モジュールに接続してからコンピュータに給電します。
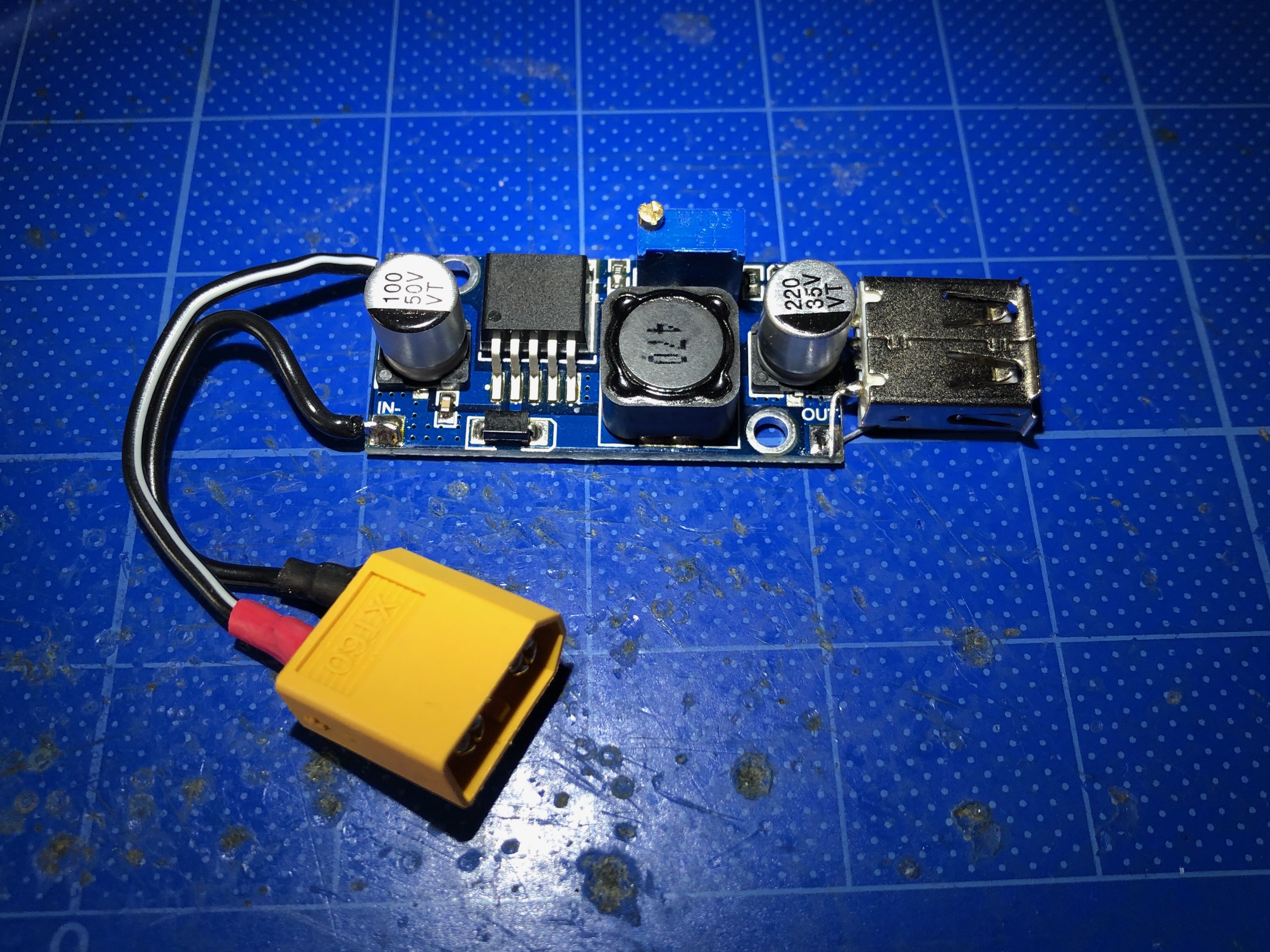
配線は少し工夫してUSB-A connectorを実装しました。これにより手持ちのUSBケーブルが活用でき、お手軽にRasPiに給電できます。
- 単体テスト
- 充電器
充電器はLiPoのバランス型充電に対応した製品を使います。現行のシステムでは2種類のLiPoバッテリですが、一台で対応可能です。